

Verkehrsadaptive Glättungsmethode (ASM)
Kontinuierliche Verkehrslage in Raum und Zeit
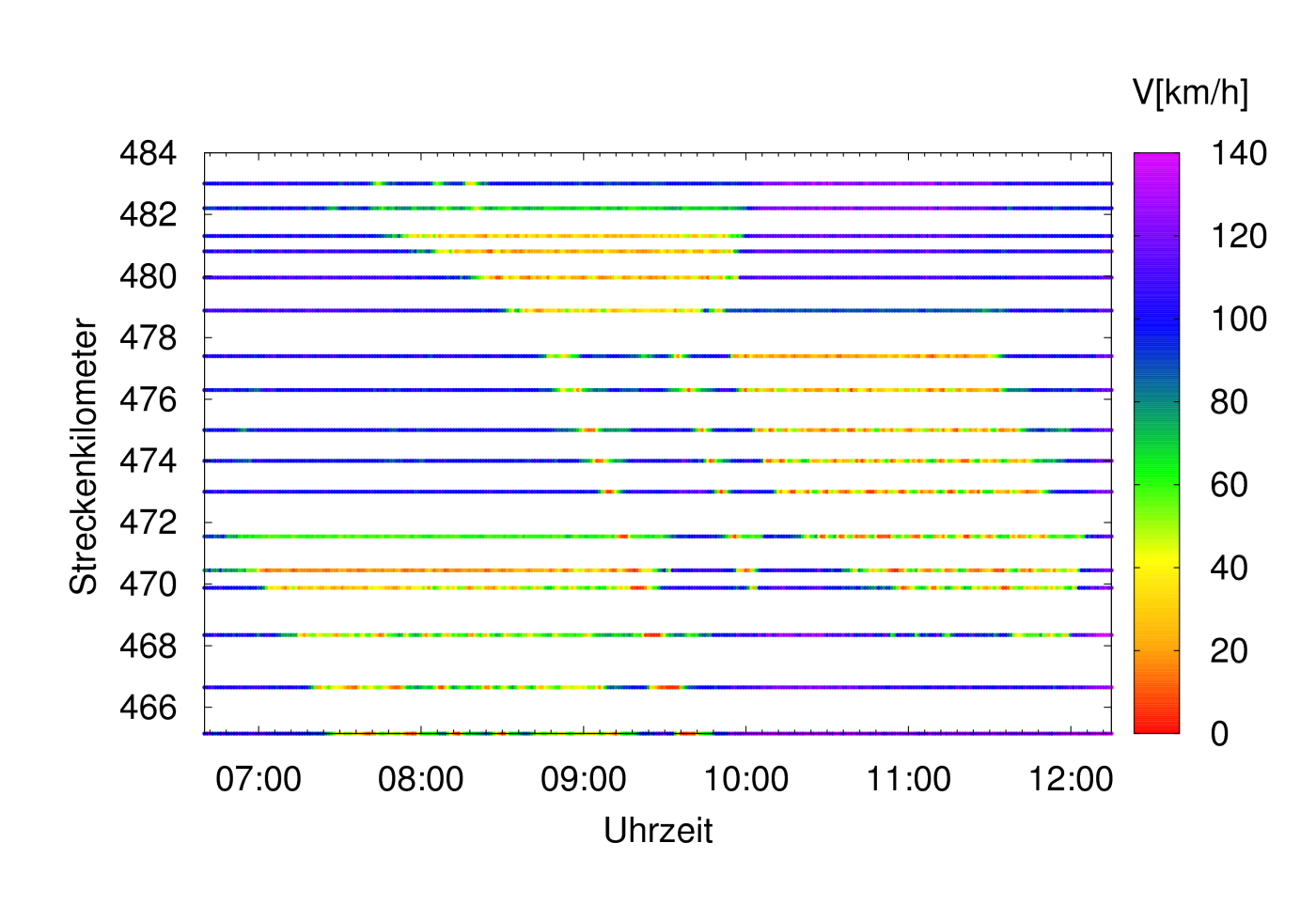
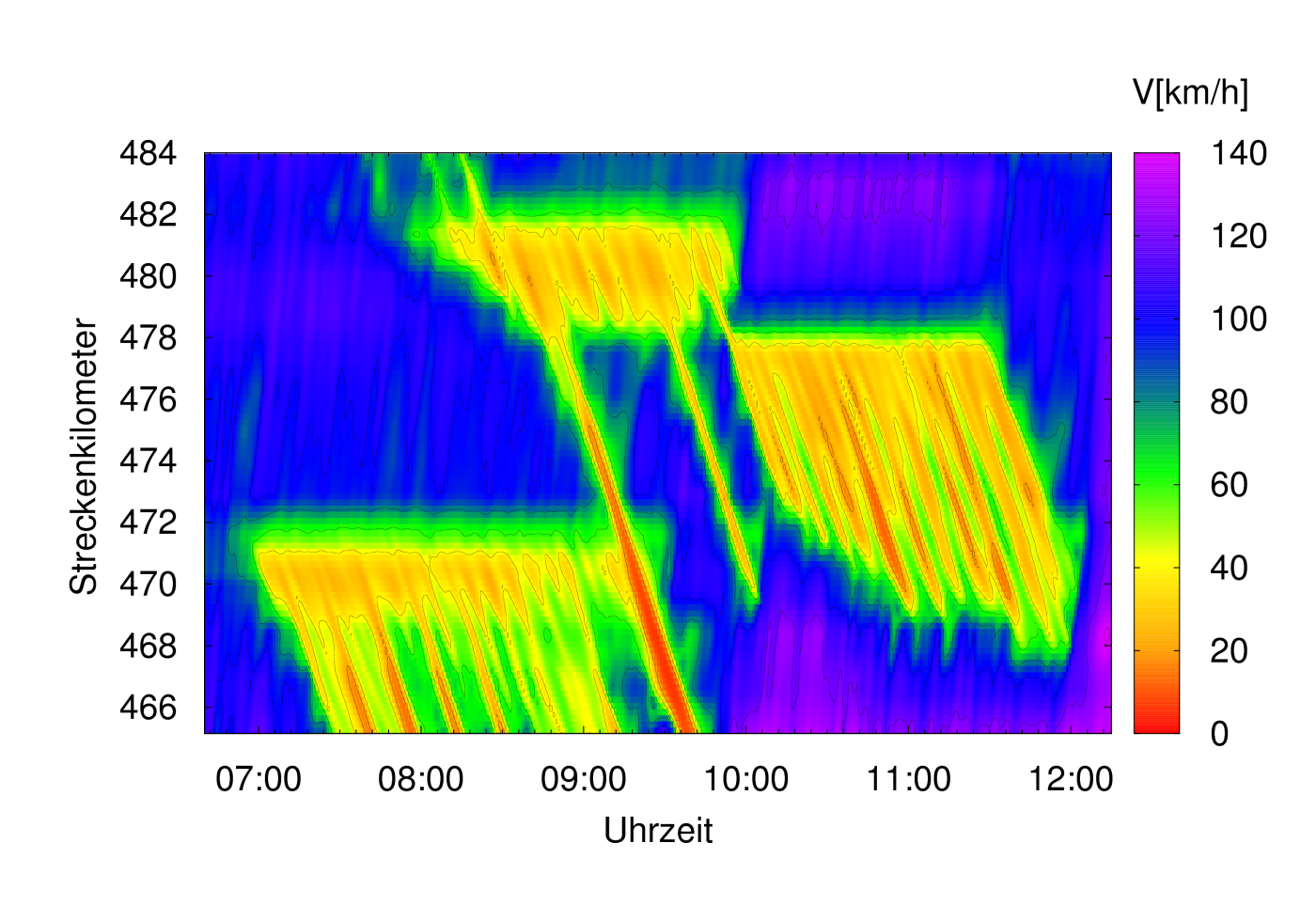
Durch eine detailgetreue Darstellung der Verkehrssituation in Raum und Zeit lassen sich zahlreiche Aspekte der Verkehrsdynamik analysieren. Stationäre Detektoren liefern aber lediglich Daten im Minutentakt an bestimmten Orten (siehe die linke Abbildung). Die Rekonstruktion der Verkehrslage besteht darin, aus den an bestimmten Orten zu bestimmten Zeitpunkten vorliegenden diskreten Geschwindigkeitspunkten eine kontinuierliche, mittlere Geschwindigkeit als Funktion des Ortes und der Zeit zu schätzen (siehe rechte Abbildung).
{kind=link}
{kind=link}
;)
Daten stationärer Detektoren
;)
Rekonstruierte Geschwindigkeit
Eine einfache ("isotrope") Glättung der Daten ist für die Anwendung auf Verkehrsdaten nicht geeignet, da die Abstände aufeinanderfolgender Detektorquerschnitte in der Regel oberhalb von 1 km und damit in der Größenordnung der Wellenlängen der Stauwellen liegen. Dadurch werden diese nicht deutlich voneinander abgesetzt und entstehen Artefakte wie das "Eierkarton"-Muster in der linken Abbildung. Die verkehrsadaptive Glättung (Adaptive Smoothing Method, ASM) kann die vorliegenden Stauwellen dagegen detailliert und plausibel rekonstruieren (rechte Abbildung).
;)
Isotrope Glättung mit Artefakten
;)
Verkehrsadaptive Glättung
Diese Methode berücksichtigt die empirischer Beobachtung, dass alle Störungen im Verkehrsfluss, also Geschwindigkeitsänderungen bzw. "Strukturen" in der raumzeitlichen Geschwindigkeitsdarstellung, entweder stationär sind oder sich mit einer von zwei bemerkenswert reproduzierbaren Geschwindigkeiten ausbreiten (siehe auch Stylized Facts):
- Im freiem Verkehr breiten sich Störungen im Wesentlichen mit dem Verkehrsfluss aus.
- Bei gestautem Verkehr breiten sich Störungen hingegen entgegen der Fahrtrichtung aus, und zwar mit einer weitgehend konstanten Geschwindigkeit von etwa -15 km/h.
Die negative Ausbreitungsgeschwindigkeit im Stau kann als Folge der Reaktionen der Fahrer auf das jeweilige Vorderfahrzeug aufgefasst werden. Aus theoretischen Überlegung lässt sich diese Geschwindigkeit als effektive Fahrzeuglänge geteilt durch die mittlere Folgezeitlücke darstellen. Nicht nur Stauwellen, sondern auch stromabwärtigen Fronten ausgedehnter Staus, ja selbst die Position anfahrender Fahrzeuge einer Ampel-Warteschlange nach Grünwerden des Signals, breiten sich mit dieser Geschwindigkeit aus. Siehe auch Validierung.
Zur Unterscheidung der beiden Ausbreitungsgeschwindigkeiten wird ein adaptiver Geschwindigkeitsfilter verwendet (Details zum Verfahren in den Referenzen).
Parameter
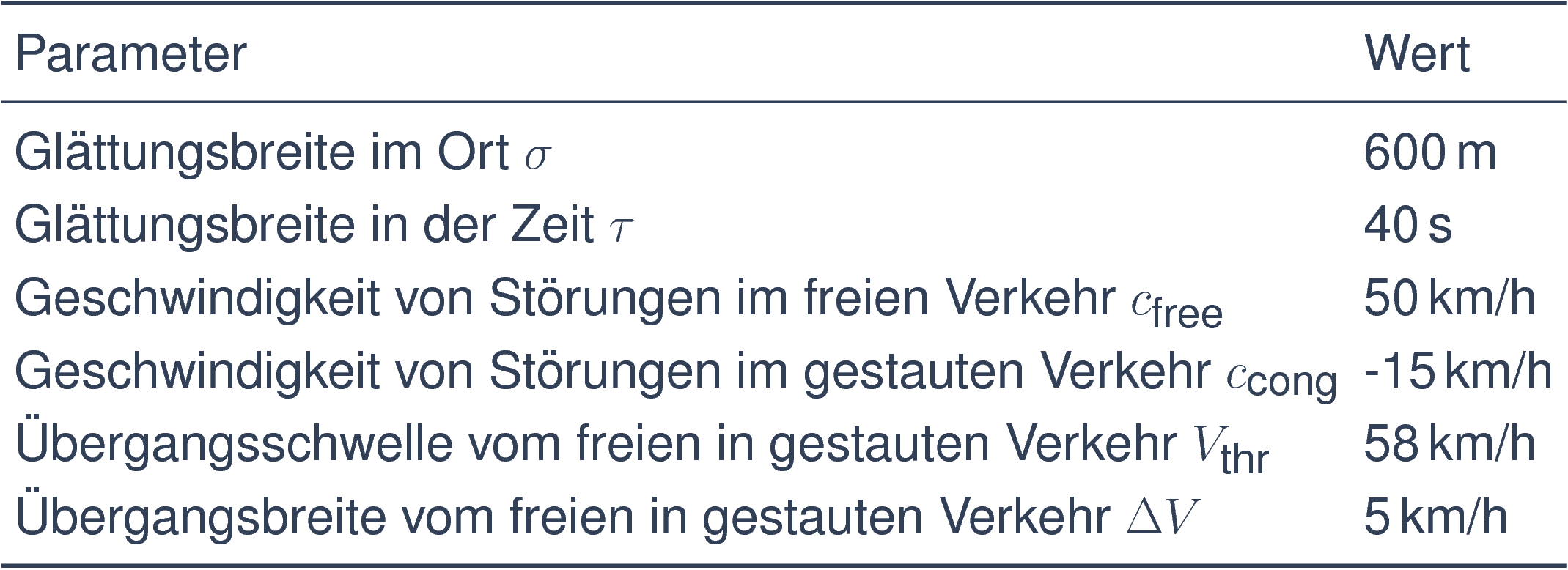
Die Parameter der Adaptive Smoothing Method (ASM) für die Erzeugung der Verkehrslagebilder in der Datenbank sind in der folgenden Tabelle zusammengefasst.
{kind=link}
;)
Parameter der ASM
Die beiden Ausbreitungsgeschwindigkeiten im freien und gestauten Verkehr werden durch die Parameter cfree und ccong festgelegt. Der Geschwindigkeitsfilter wird durch die Übergangsschwelle Vc und die Übergangsbreite ΔV parametrisiert. Weiterhin sind die rein für die Darstellung verantwortlichen Glättungsparameter τ und σ in einem weiten Bereich frei wählbar.
Kalibrierung
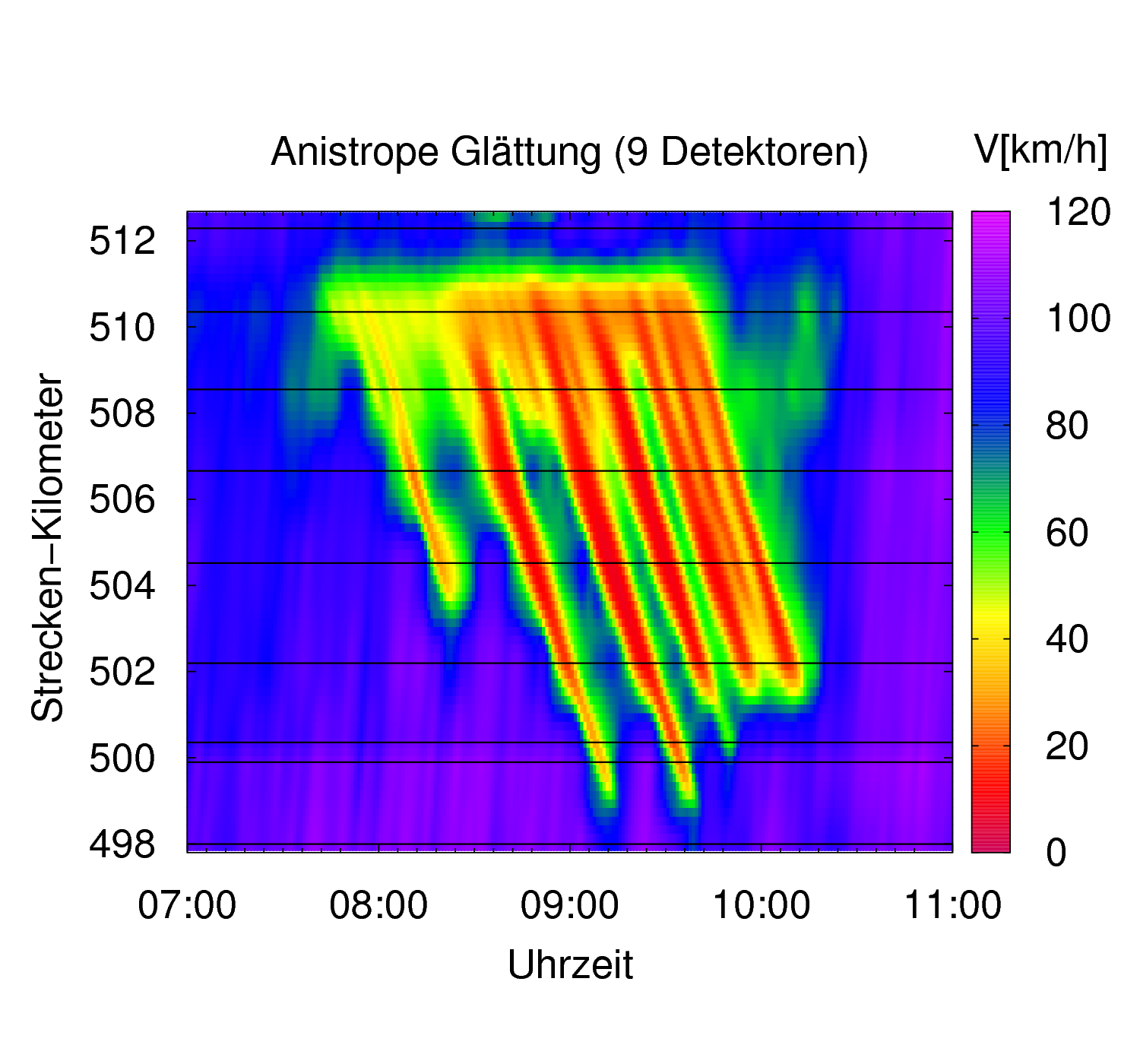
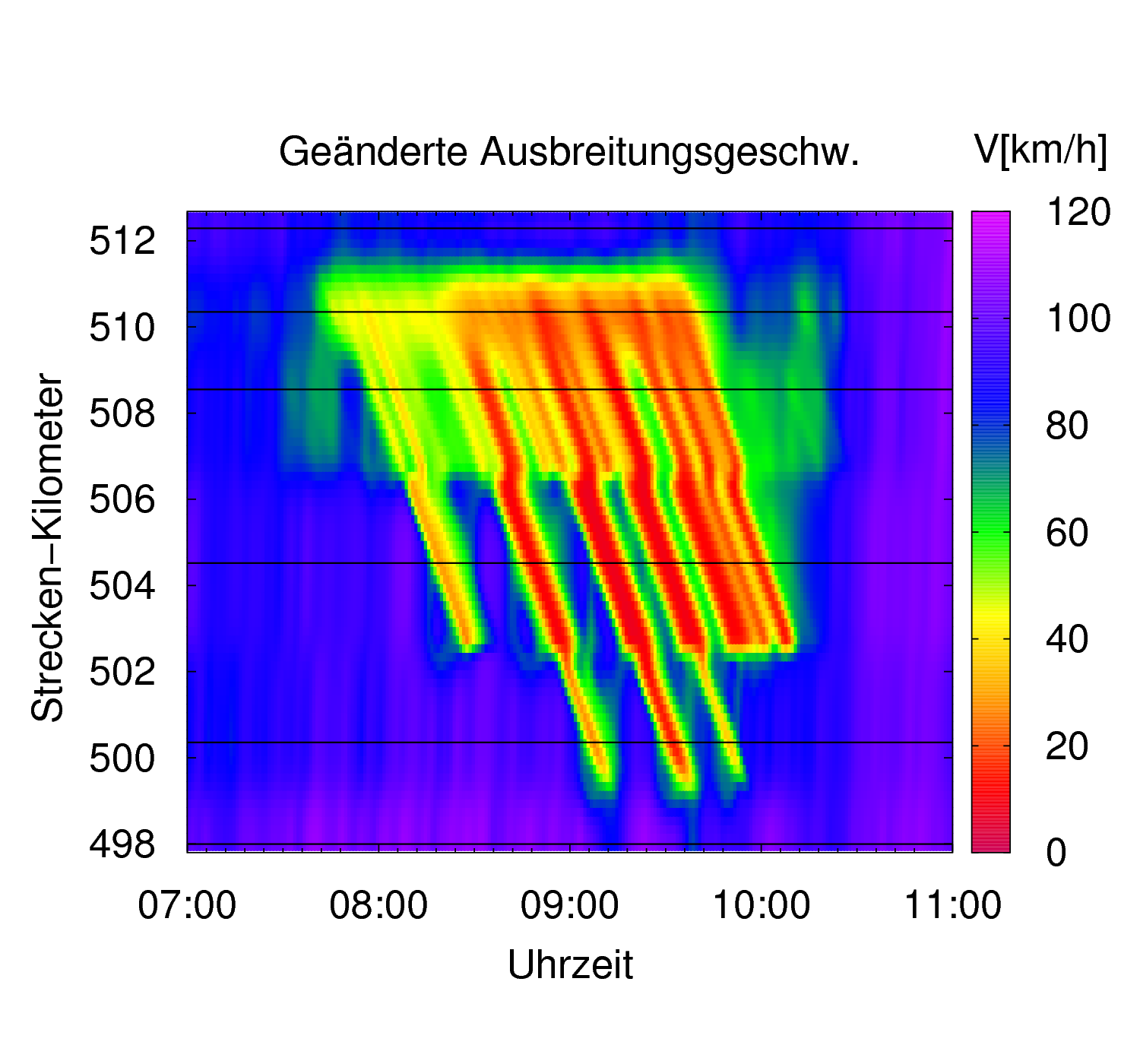
Durch eine Variation der Parameterwerte aus der Tabelle läßt sich überprüfen, wie "robust" die Verkehrslageschätzung ist bzw. wie sensitiv das Ergebnis von den verwendeten Parameterwerten abhängt. Als Referenz dient die obige Abbildung von der A9.
{kind=link}
Ausbreitungsgeschwindigkeiten
Im linken Diagramm sind die Ausbreitungsgeschwindigkeiten gegenüber den
Referenzwerten variiert worden: cfree = 200 km/h ist
nun zu groß
und ccong =-10 km/h betragsmäßig zu klein.
Im rechten Diagramm gilt hingegen
cfree = 200 km/h
und ccong =-20 km/h, beide Werte sind also
betragsmäßig zu groß.
;)
Geänderte
Ausbreitungsgeschwindigkeiten: cfree ist zu
groß und ccong
betragsmäßig zu klein
;)
Geänderte
Ausbreitungsgeschwindigkeiten: cfree
und ccong
betragsmäßig zu groß
Übergangsparameter
Geänderter Geschwindigkeitsfilter
Im nebenstehenden Diagramm wurden hingegen die Übergangsparameter des nichtlinearen Filters geändert: Die Schwelle ist deutlich niedriger (Vc = 40 km/h statt 57 km/h) und die Übergangsbreite deutlich größer (ΔV = 20 km/h statt 5 km/h).
Wenn man genauer hinsieht, erkennt man, dass hier einige Strukturen statt gestautem Verkehr fälschlicherweise freien Verkehr zugeordnet wurden, die Stauwellen selbst hingegen kaum verändert sind.
Deutlicher sieht man die Änderungen erst, wenn man zusätzlich die verfügbaren Detektoren weiter ausdünnt. In den im Folgenden abgebildeten Beispielen wurden der Methode nur 6 statt der ursprünglichen 9 Querschnitte zur Verfügung gestellt.
;)
Geänderte Ausbreitungsgeschwindigkeiten
;)
Geänderter Geschwindigkeitsfilter
Ergebnis
Das Verfahren erwies sich als sehr robust, d.h. das von ihr rekonstruierte Geschwindigkeitsfeld hängt nur schwach von den Werten der Parameter ab. Erst bei Querschnittsabständen oberhalb 3 km (wo die konventionelle Glättung bereits vollständig versagt) sieht man bei falsch gewählten Werten deutliche Artefakte. Den wichtigste Einfluss hat die angenommene Ausbreitungsgeschwindigkeit ccong von Störungen im gestauten Verkehr. Ein zu hoher Wert wie auch ein zu niedriger Wert (kleiner als 12 km/h) führen zu artifiziellen, diskreten Stufen (vgl. die linke Abbildung). In der Praxis kann man für Autobahnverkehr die Tabellenwerte unbesehen übernehmen. Achtet man aber auf (für die Lageschätzung irrelevanten) Details, kann man umgekehrt durch Minimierung einer geeigneten Fehlerfunktion die genaue Ausbreitungsgeschwindigkeit ccong auf der jeweiligen Autobahn schätzen.
{kind=link}
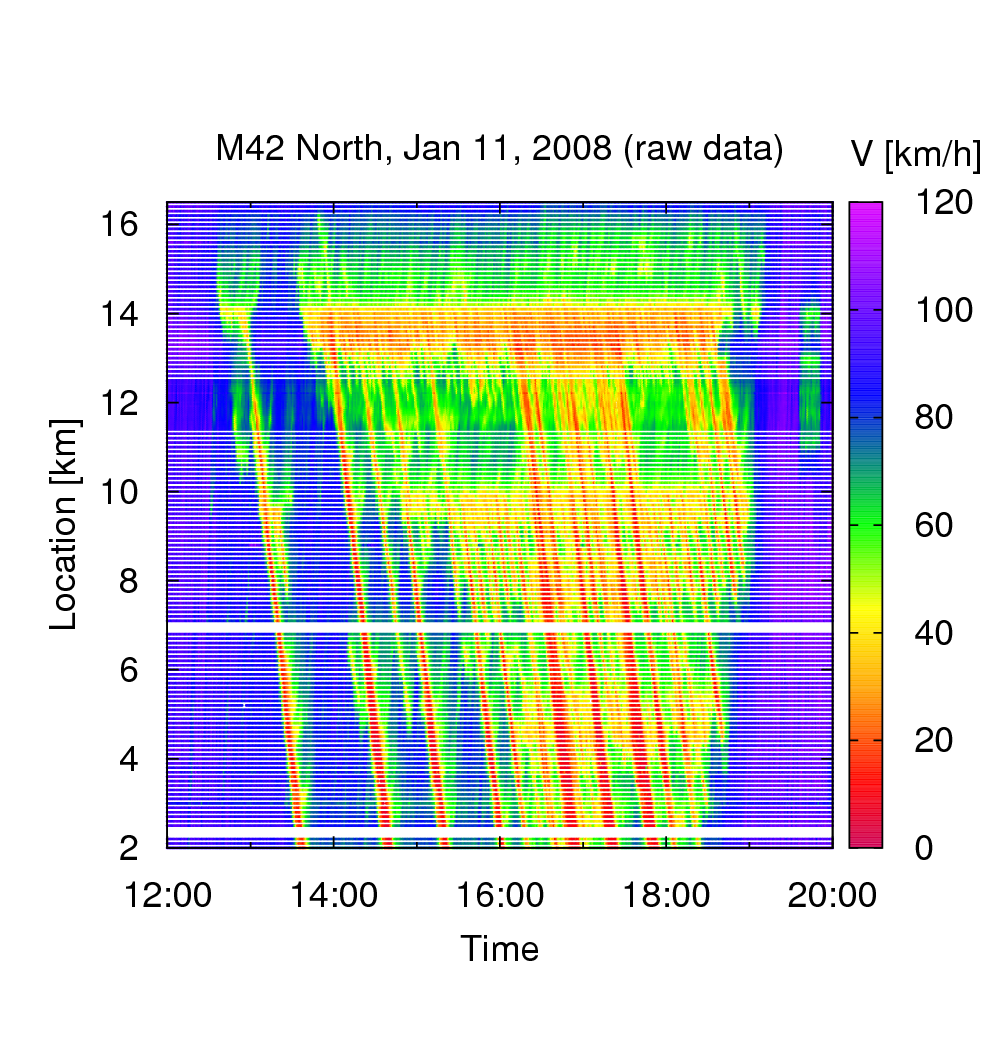
Validierung
;)
Direkte Darstellung der Daten ("echte" Verkehrslage bzw ground truth)
Trotz der offensichtlichen Robustheit könnte man auf den Gedanken kommen, dass die Logik der Methode zirkulär ist. Schließlich steckt man mit den Ausbreitungsgeschwindigkeiten cfree und ccong Informationen in die Methode hinein, die ja eigentlich erst im Ergebnis herauskommen sollen. Eine wissenschaftliche Validierung setzt deshalb einen Vergleich der Schätzung mit der zweifelsfrei festgestellten Wirklichkeit, der sogenannten ground truth voraus. Die Abdeckung mit Detektoren muss also so dicht sein, dass die quasi vollständige Information über die Verkehrslage bereits in den Daten vorliegt. Auf einem Streckenabschnitt auf der M42 in England haben die Detektoren Abstände von lediglich 100 m zueinander. Die rechte Abbildung zeigt diese Datenpunkte ohne jegliche Interpolation! (Um den km 12 liegen die Detektoren sogar noch dichter, während weiße Streifen auf fehlende Daten hinweisen.)
{kind=link}
;)
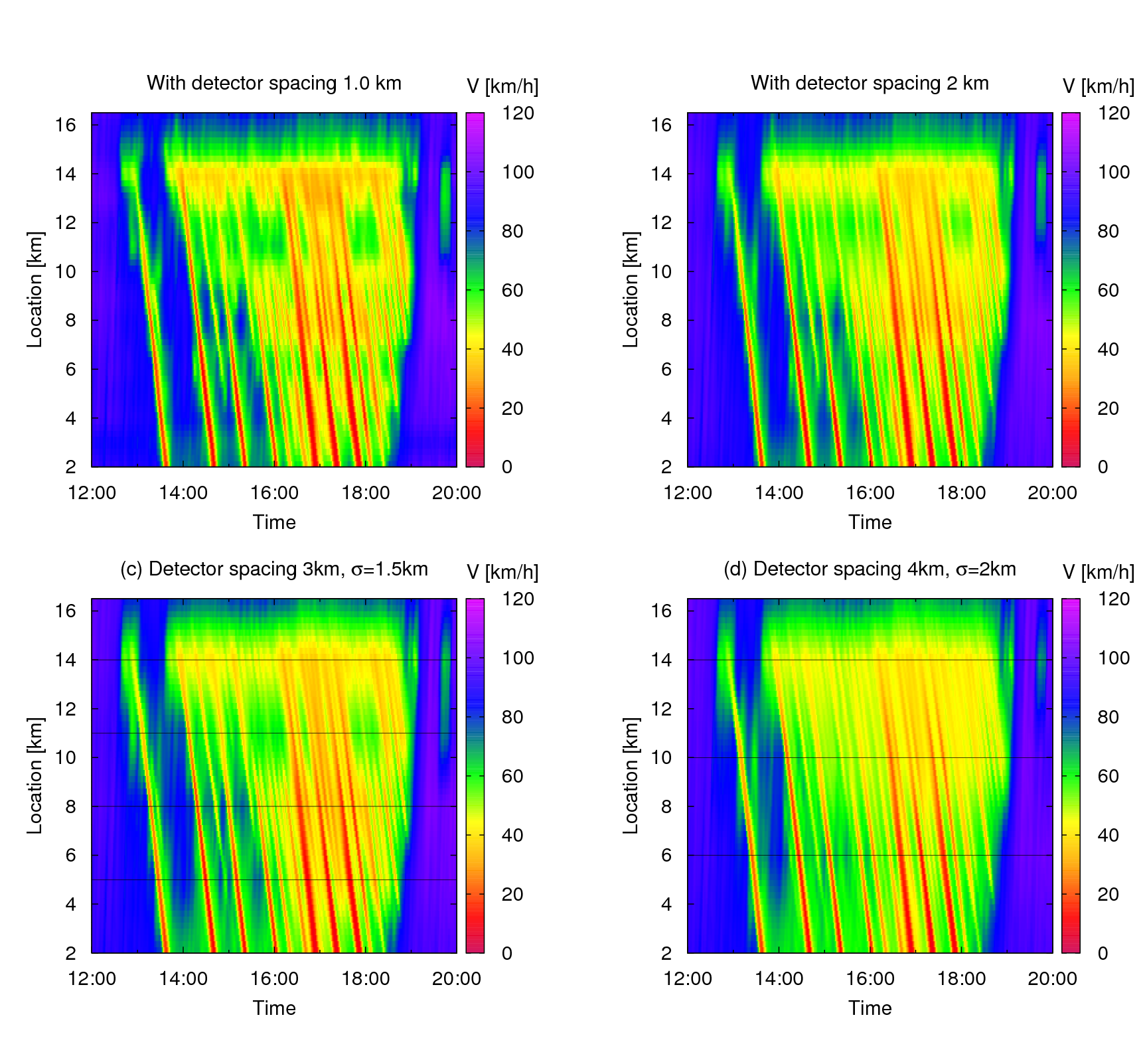
Interpolierte Verkehrlage bei reduzierter Detektoranzahl
Eine Möglichkeit zur Validierung der verkehrsadaptiven Interpolationsmethode ASM besteht darin, dass man sie auf unvollständige Detektordaten anwendet und das Ergebnis mit der ground truth vergleicht. Die linke Abbildung zeigt die resultierenden Verkehrslagerekonstruktionen bei Verwendung lediglich jedes 10., 20., 30. bzw. 40. Detektors. Der Detaillierungsgrad nimmt zwar bei der Glättung und Interpolation ab, aber die Annahmen der zwei charakteristischen Geschwindigkeiten im freien und gestauten Verkehr werden auch in der "echten" Verkehrslage beobachtet. In Übereinstimmung mit den Robustheitstests ergibt sich eine hinreichende Genauigkeit für Abstände bis etwa 3 km.
{kind=link}
Schlussfolgerung
Die adaptive Glättungsmethode ASM ermöglicht eine plausible und detailgetreue Rekonstruktion der "echten" Verkehrssituation, wenn benachbarte Messquerschnitte nicht weiter als 3 km auseinander liegen. Die ASM kann auch zur Fusionierung weiterer Punktdatenquellen verwendet werden, wie
- Floating-Car-Daten (FCD),
- Floating-Phone-Daten (FPD),
- Einzelmeldungen von Polizei oder privaten Staumeldern.
Referenzen
- Martin Treiber, Arne Kesting, R. Eddie Wilson:
Reconstructing the traffic state by fusion of heterogeneous data
Computer-Aided Civil and Infrastructure Engineering 26, 408-419 (2011).
Abstract,
Preprint
- Arne Kesting, Martin Treiber:
Datengestützte Analyse der Stauentstehung und -ausbreitung auf Autobahnen
Straßenverkehrstechnik Heft 01, p. 5-11 (2010).
PDF
- Martin Treiber, Dirk Helbing:
Reconstructing the spatio-temporal traffic dynamics from stationary detector data
Cooper@tive Tr@nsport@tion Dyn@mics 1 3.1-3.24.
PDF